HapLAB
Haptic feedback leads us through the day – many interfaces are tangible. From starting the computer in the morning to turn on the oven in the evening. Often it’s driven by mechanical boundaries and thinking about possible implementations.
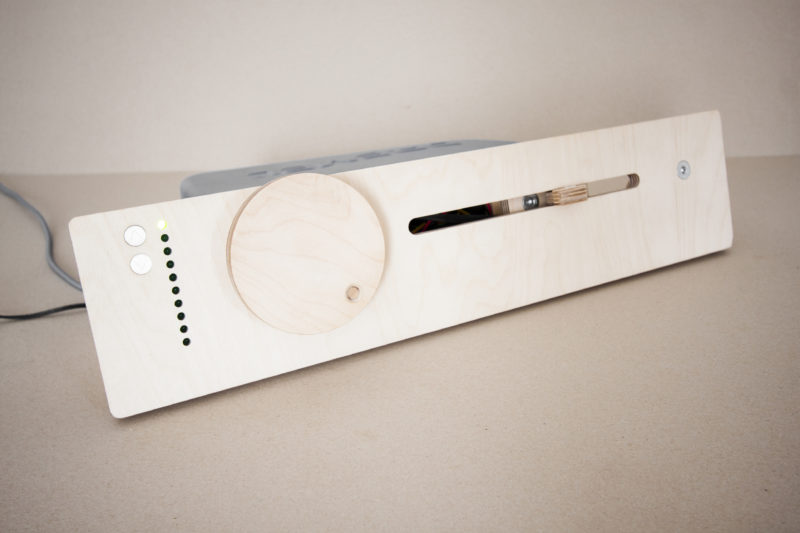

This project shoots beyond those limitation and explores new kinaesthetic feedback for hardware interface design.
For the maximum ease of recreation most parts are made of 12mm plywood.
Download CAD Files 6 MB (.step | Solidworks 2016)
Note: I figured out that the belt based drive has a too high friction for this application. So please consider a steel cable drive to achieve a lower base-damping.
I started out with the fantastic Hapkit from the Standford University to look into the principles of kineasthetic haptic simulation.